Project Overview
This project represents a comprehensive exploration of hardware fabrication, electronics integration, and artificial intelligence deployment. I designed and built a custom fixed-wing drone from scratch, 3D printing all structural components and hand-soldering every electronic connection. The ultimate goal is to deploy a locally-run AI system capable of real-time computer vision for gait analysis and person re-identification.
Technical Implementation
3D Design & Fabrication
Designed and printed all airframe components including fuselage, wings, and control surfaces. Optimized weight distribution and structural integrity for flight performance.
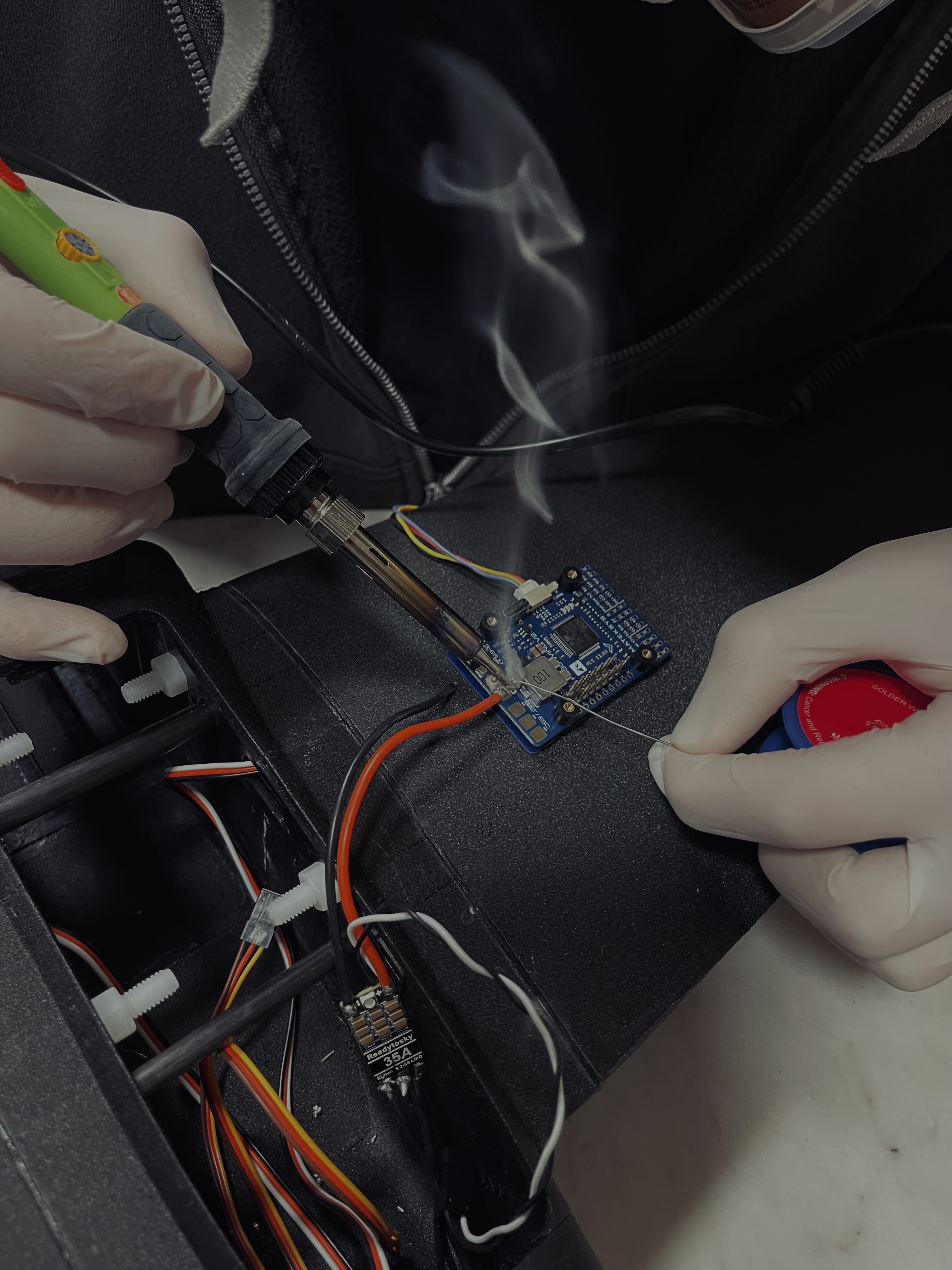
Electronics Integration
Hand-soldered all flight controller connections, ESCs, servos, and power distribution systems. Integrated camera modules and communication systems for telemetry.
AI & Computer Vision
Developing edge AI deployment for real-time gait pattern analysis. Implementing person re-identification algorithms optimized for embedded systems and aerial perspectives.
Flight Systems
Configured flight controller firmware, calibrated sensors, and programmed autonomous flight modes. Integrated RC control systems with telemetry feedback.
Project Gallery





Build Process
Phase 1: Fabrication
3D printed all components using optimized print settings for strength-to-weight ratio. Post-processed parts for smooth surfaces and proper fit.
Phase 2: Electronics Assembly
Soldered flight controller, ESCs, and all sensor connections. Implemented proper wire management to ensure reliable operation.
Phase 3: System Integration
Mounted all electronics within the airframe, balanced the aircraft, and calibrated sensors. Configured flight controller parameters and tested control surfaces.
Phase 4: AI Development (In Progress)
Training computer vision models for gait analysis and person re-identification. Optimizing inference for edge deployment on limited computational resources.
Skills Developed
- 3D Printing: Using slicers such as Bambu Lab to properly configure prints
- Soldering & Electronics: Hand-assembled intricate electronic systems with proper technique and quality control
- Embedded Systems: Configured flight controllers and sensor integration
- Machine Learning: Developed and optimized neural networks for edge deployment
- Computer Vision: Implemented gait analysis algorithms for person re-identification
- System Integration: Combined mechanical, electrical, and software components into a cohesive platform
- Problem Solving: Debugged complex hardware-software interactions and overcame integration challenges
- Safety Protocols: Followed proper procedures for battery handling, soldering, and testing
Technical Challenges
Weight Optimization
Balancing structural integrity with minimal weight required careful material selection. Each component was evaluated for its weight contribution versus functional necessity.
Power Management
Designing an efficient power distribution system to support flight systems, camera, and AI processing while maintaining flight time and safety margins.
AI Edge Deployment
Optimizing computer vision models to run on embedded hardware with limited computational power while maintaining real-time performance for aerial surveillance applications.
Future Development Goals
Autonomous Navigation: Implement GPS waypoint navigation and obstacle avoidance capabilities
Real-Time Tracking: Deploy trained AI models for live gait-based person tracking and re-identification
Data Pipeline: Develop efficient data collection and processing pipeline for model improvement
Extended Range: Optimize power systems for longer flight times and greater operational range
Telemetry Dashboard: Create ground station software for real-time monitoring and control
Technologies & Tools
Hardware: 3D-printed airframe, flight controller, ESCs, brushless motors, LiPo batteries, camera modules, RC receiver/transmitter
Software: Flight controller firmware, Python for AI development, TensorFlow/PyTorch for model training, OpenCV for computer vision
Tools: Soldering station, 3D printer, CAD software
← Back to Portfolio